2016 Season kicked off on Saturday, January 9th. The team went to WCTC to meet up with other teams for the FIRST game kick-off event.
This year’s challenge Stronghold is a medieval-themed game played by two Alliances of three robots each. Robots score points by picking up a 10″ ball, crossing obstacles called defences, and shooting the ball into a goal. Keeping with the medieval theme of the game, the field had a castle that was to be captured by the alliance. The full game explanation and animation can be found here.
Week 1: Strategy and Design
During week 1, we had to develop goals and needs for our robot. We decided to develop a robot capable of going under the low bar, damage 4 of 5 defensive categories, shoot the low goal, shoot the high goal and climb the tower. We started building out the playing field items that would be needed to test and practice with the robot. The CAD (Computer Aided Design) team started designing the robot components and the programming team began testing code to use during the season.


Week 2 – Design and Prototype
Design work continued, the team started to prototype different ideas for chassis design. Different ideas were considered for wheels and drivetrain while the control team experimented with different auto-align codes using an old chassis.

Week 3- CAD and Fabrication
The Computer Aided Design (CAD) team continued working with the climbing and a high shooting mechanisms while the programming team worked on code for the tank drive. The team also worked on gearbox selection and we sent CAD files to our sponsors for laser cutting. The programming team attached our woodbox prototype to an old chassis and continued to develop code.
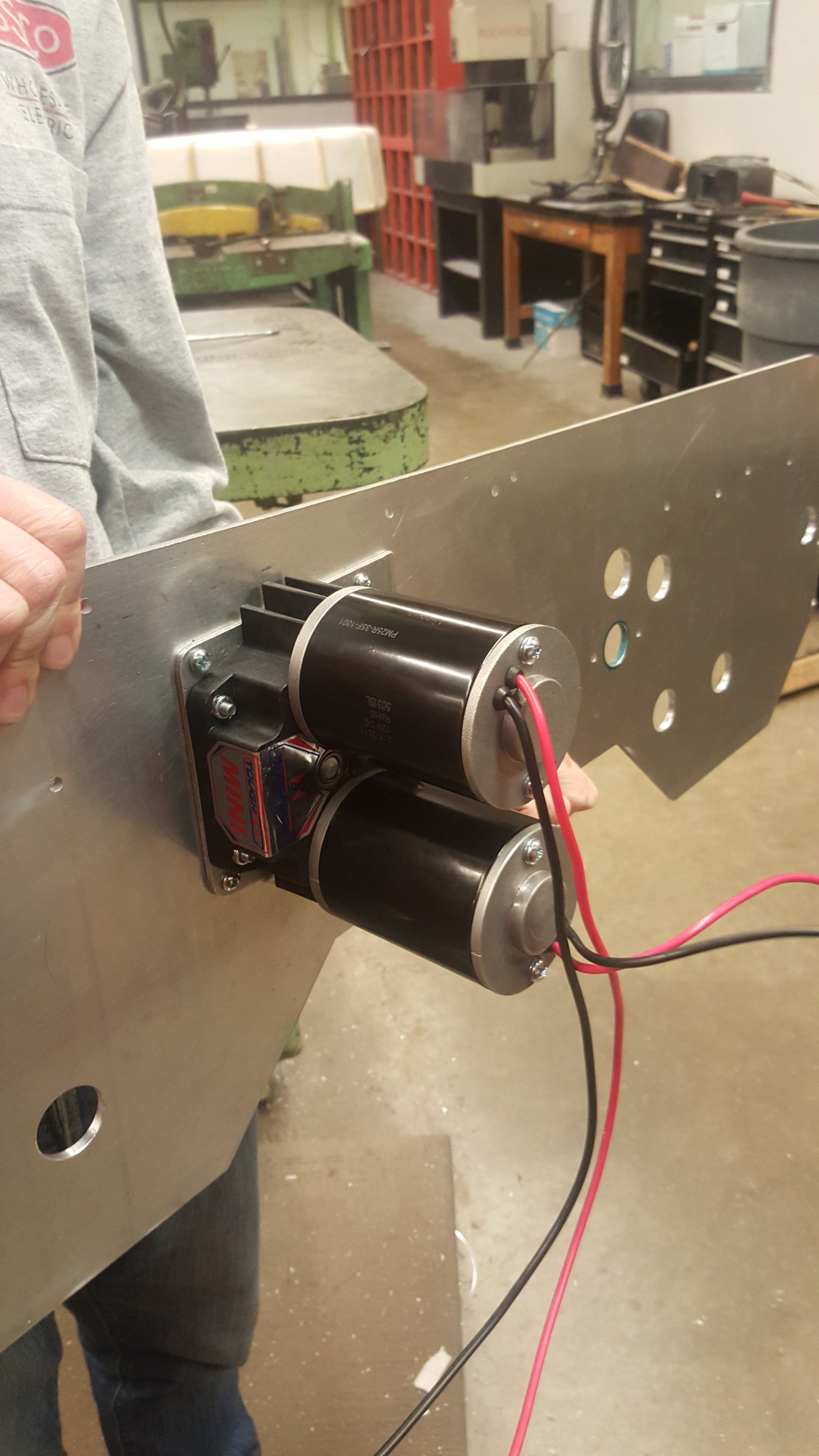
Week 4 – Fabrication and assembly
This week we received our side panels and other parts from GenMet. We started to bore holes to fit for bearings and tap screw holes as the chassis took shape. The control team continued practicing with the previous bot and starting to write code to deploy to this bot.



Week 5 – Control Assembly and Testing
This week the control team was able to install electrical components and the robot came to life this week. We were able to connect the robot to the driver station and drive it.

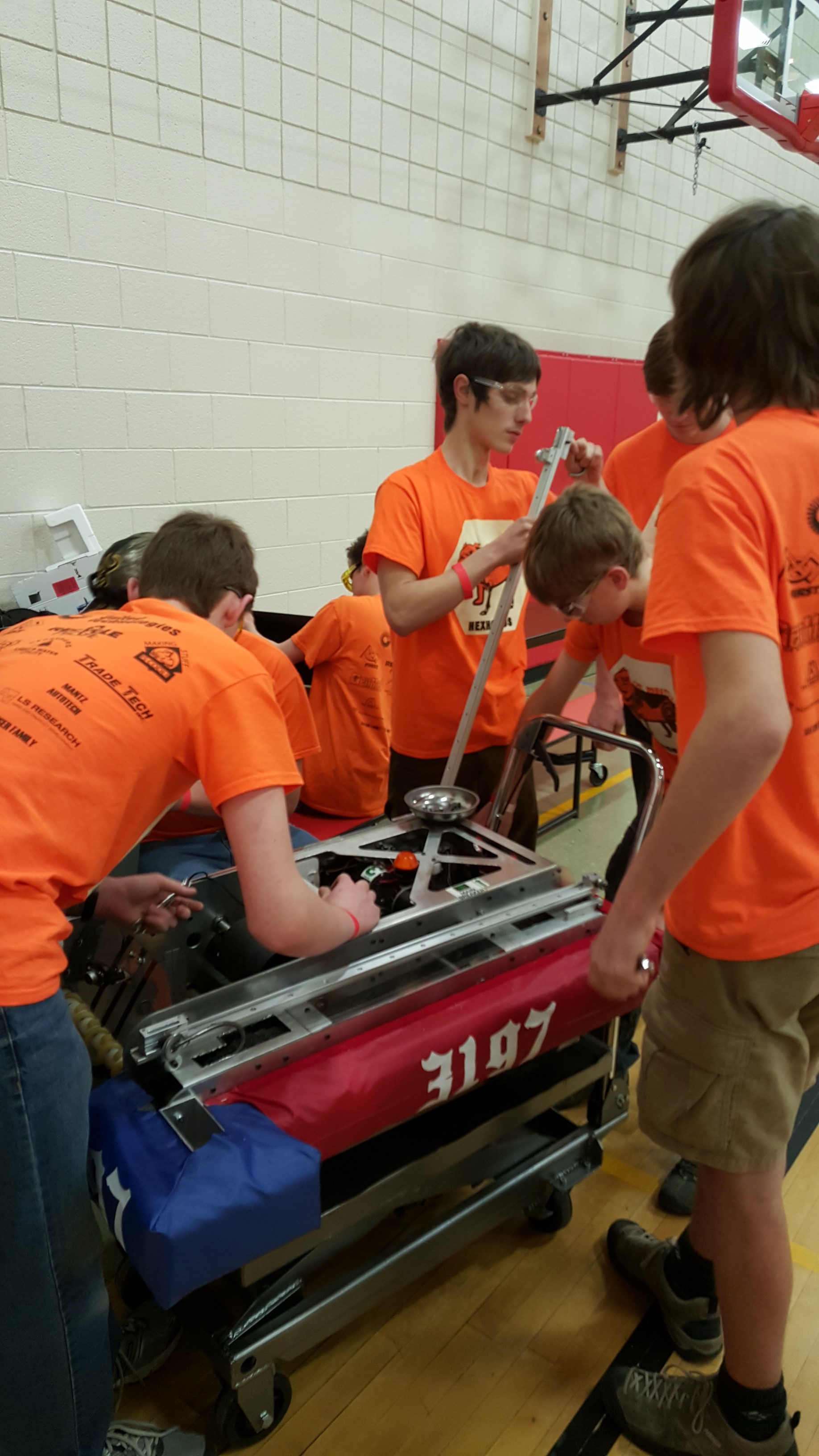
Week 6 – Last week! Testing and Tuning
This is our last week to work on our competition bot. We are finishing up the wiring and programming of our bot. We were able to to take our bot to the Mini Regional in Sussex, WI.




First time going over defense!
Bag Day! – 2/23/16 11:59 pm
The final day to work on our robot. After this we will put it in a bag until our Wisconsin Regional Competition.