The 2019 Season kicked off on Saturday, January 5th. This year’s challenge, Destination: Deep Space!, is a space-themed game played by two alliances with three teams each. Robots score points by filling rockets with cargo and securing them with hatches. There are two rockets and one cargo ship where robots can place these elements. Robots can earn points at the end of the game by climbing the Hab levels to return to safety. The full game explanation and animation can be found here.
Week 1- Strategy and Design
This season began with ideas for the robot’s hatch mech intake, cargo intake, and climber. The team set goals to play every aspect of the game. CAD design and prototypes also started and we considered pneumatics for the hatch mech intake. The control team worked with last year’s robot to test new NEO motors for that we used for the first time this season.




Week 2 – Design and Prototype
The Computer Aided Design (CAD) team worked on models and prototyping continued, especially for the intakes and climber. The hatch mech intake went through several different iterations before the final design was decided upon. Design reviews of CAD models took place and chassis decisions and designs were created as well. The construction of field elements began this week.


Week 3- CAD and Fabrication
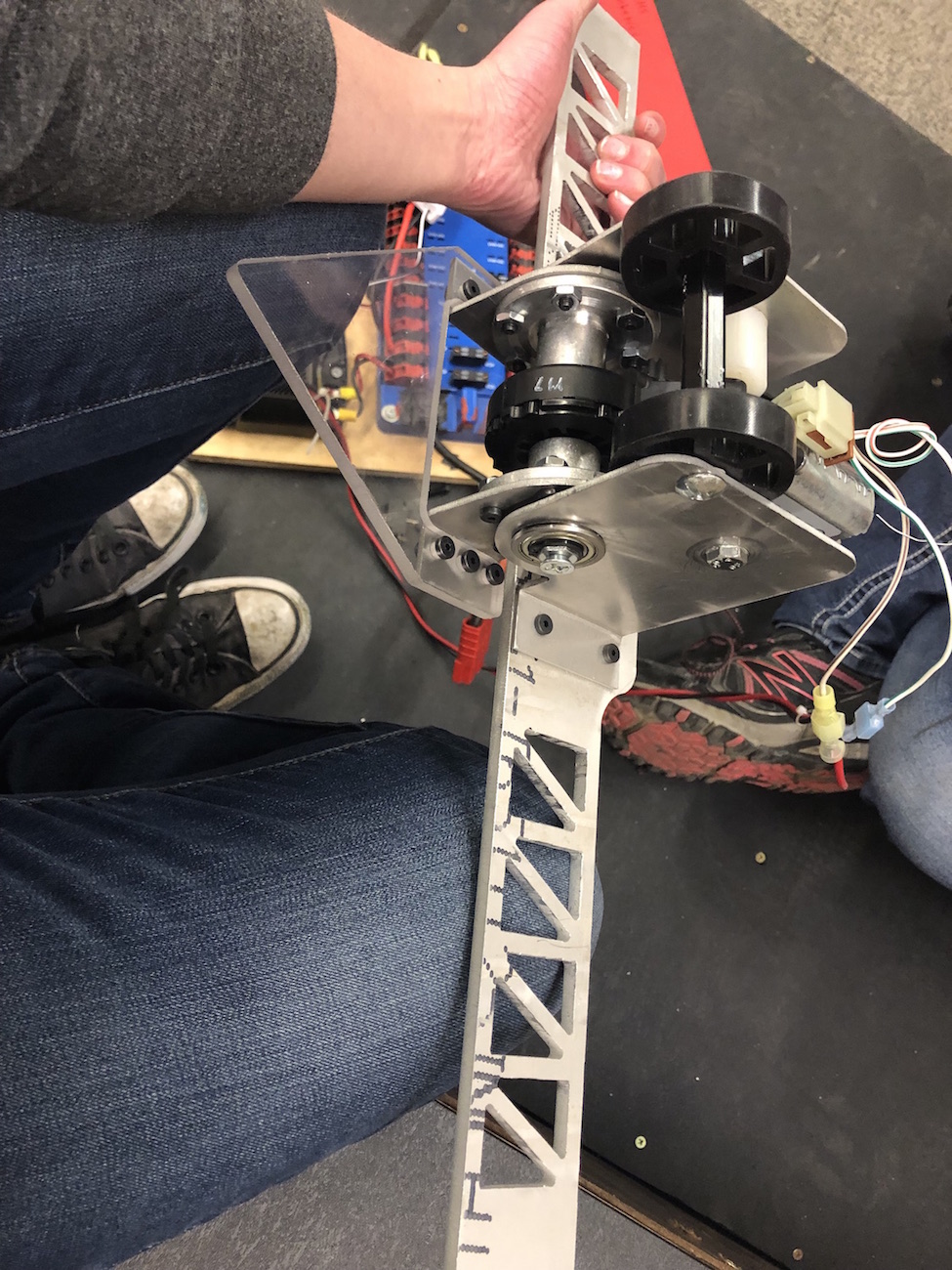
Machining on parts began after we received waterjet pieces from our sponsor Struck Corporation. The robot’s rolling chassis was finished by the end of the week. The hatch mech intake began to take shape, with pieces being waterjet for that as well. The control team continued testing NEO motors, which were added to the chassis.



Week 4 – Fabrication and Assembly
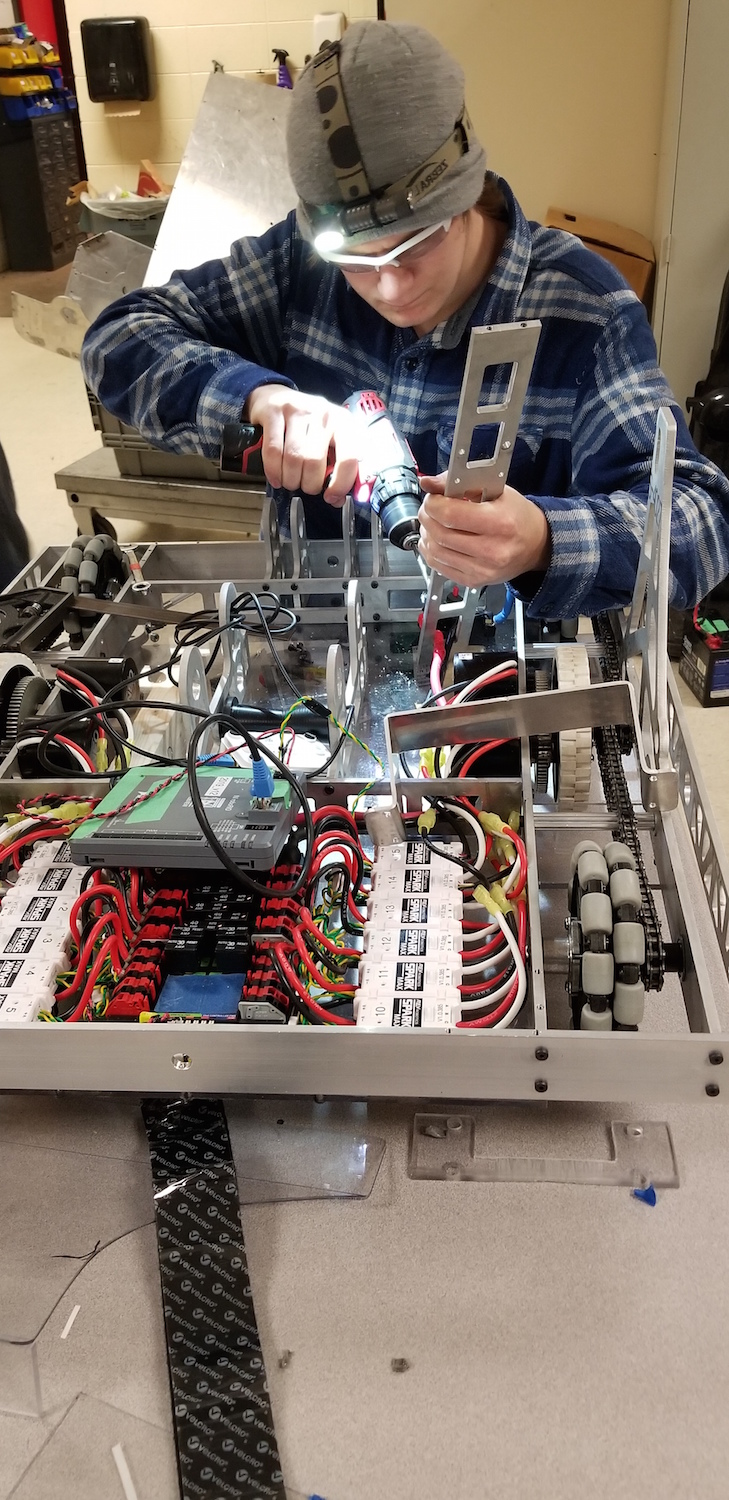
More waterjet parts were cut and received from Struck Corporation during several snow days this week. The electrical team worked to begin wiring the robot and the baby carriage and elevator were assembled and added onto the robot. The hatch mech intake finished manufacturing and was assembled.


Week 5 – Control Assembly and Testing
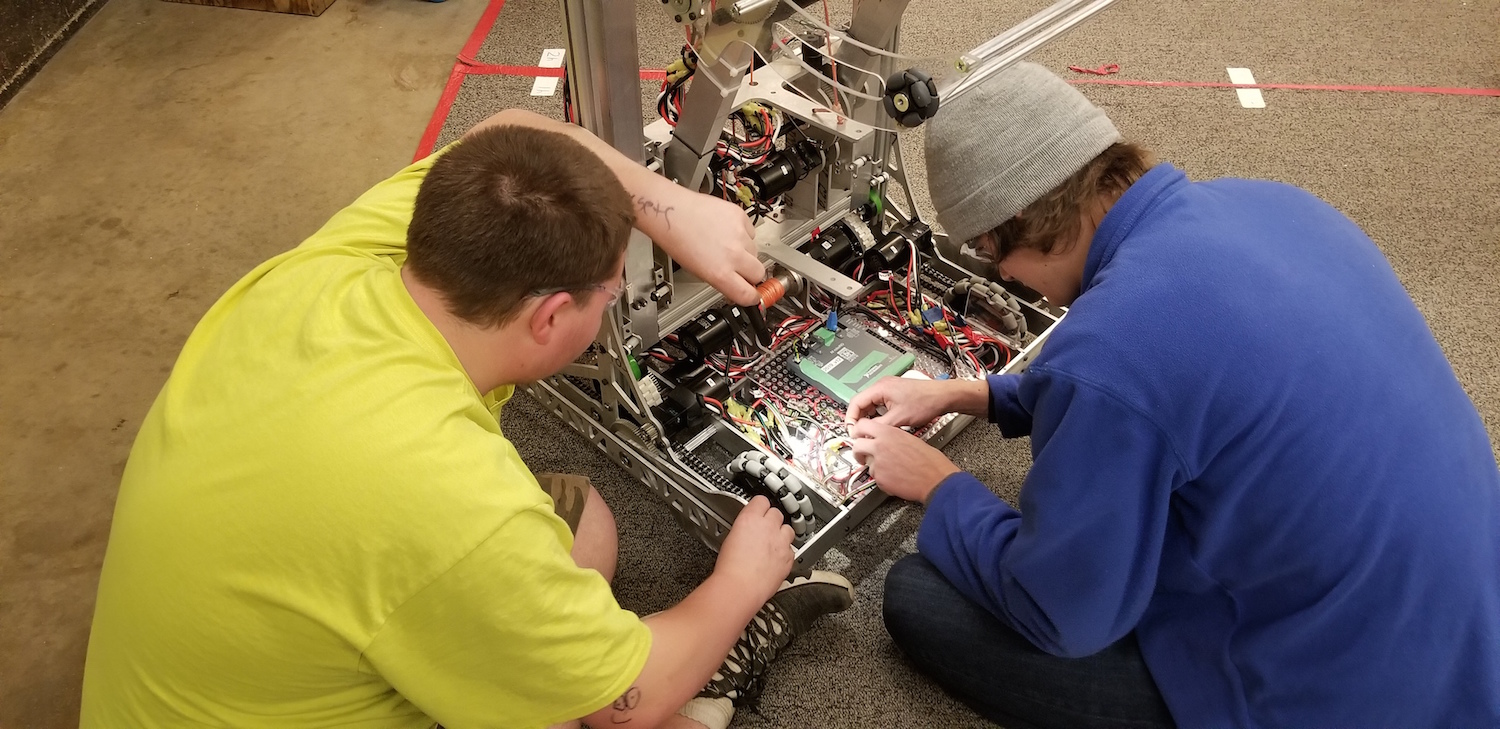
The cargo and hatch mech intakes were added to the robot and the electrical team continued wiring. The hatch and cargo mech intakes were tested with game pieces. The control team began testing code and presets this week.


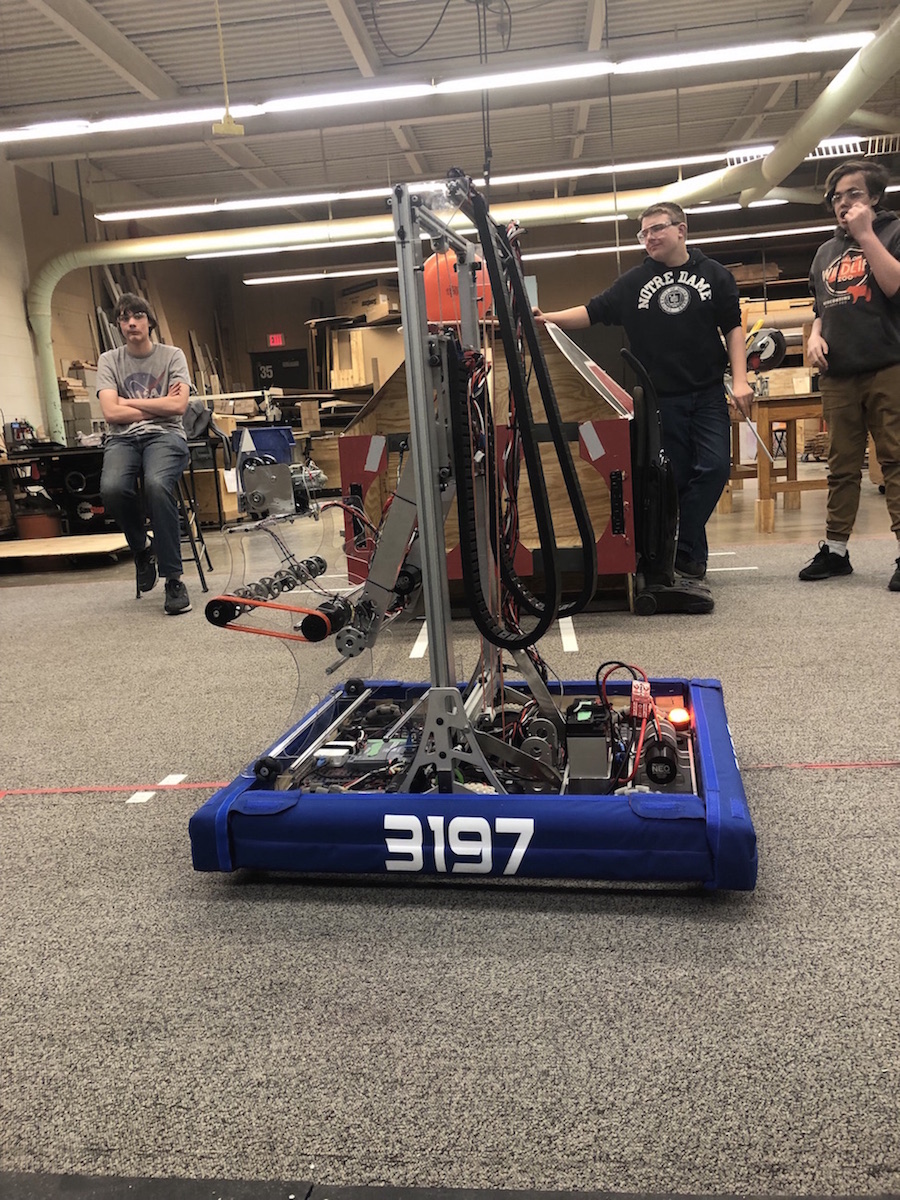
Another Saturday in the books. The team worked hard getting bot 1 assemebeld and started to move it around. Bot 2 is driving. Lots of troubleshoot and testing left.
Posted by Cedarburg High School Robotics – Team 3197 – Hexhounds on Sunday, February 10, 2019
Week 6 – Last week! Testing and Tuning
The control team began driving and placing game pieces with the robot this week. The electrical team added limit switches to the elevator, baby carriage, and intake mechs. The team attended a Mini-Regional in Sussex, WI to test the robot. It performed very well, running ten different matches, with several consecutively.



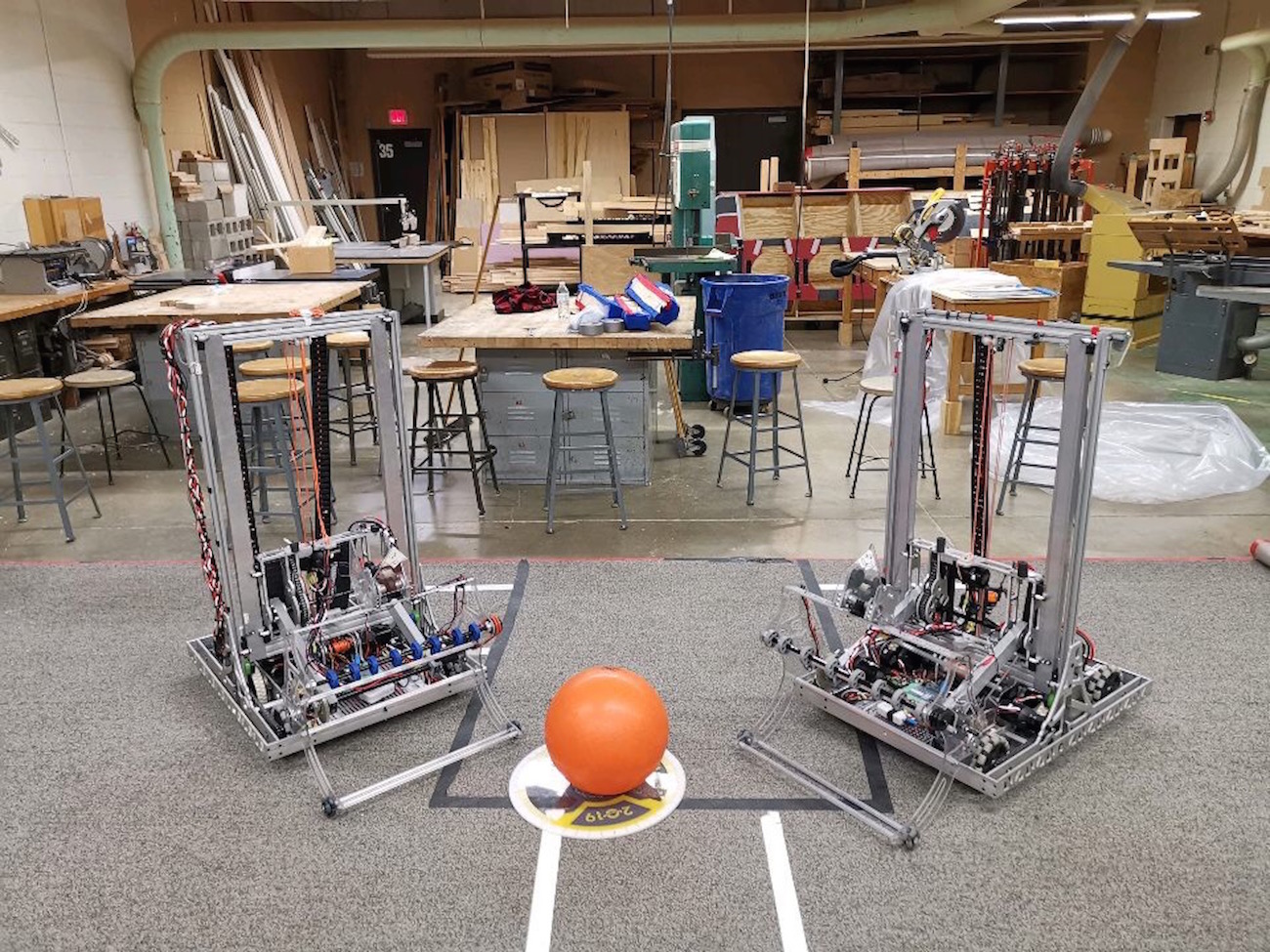
Bag Day! – 2/19/19 at 11:59 pm
This was the final day to work on our robot. We finished two robots that were exactly identical, one for competition and one for continued testing and updates until the regional competitions. After this we put the robot in a bag until the St. Louis and Milwaukee Regional Competitions in March.