
![]()
2018 Season kicked off on Saturday, January 6th. The team went to WCTC to meet up with other teams for the FIRST game kick-off event.
This year’s challenge is Power Up!, a three on three dynamic strategy game where power cubes are manipulated to score on a high balance scale or low balance scale. More information can be found here.
Week 1- Strategy and Design
During kickoff and Week 1, brainstorming was the main focus. Everyone was involved in coming up with different ideas for the goals the robot needed to accomplish in order to be competitive. Prototyping and CAD design for the cube intake began as well.



Week 2 – Design and Prototype
Chassis design and prototyping continued this week, with some manufacturing beginning to take place in the metal shop. Ideas for an elevator design for the robot began to shape up.

Week 3- CAD and Fabrication
The Computer Aided Design (CAD) team finished chassis design and manufactured the necessary pieces of the chassis this week. By the end of the week we had a finished chassis! The elevator and claw mech designs continued and began manufacturing this week.


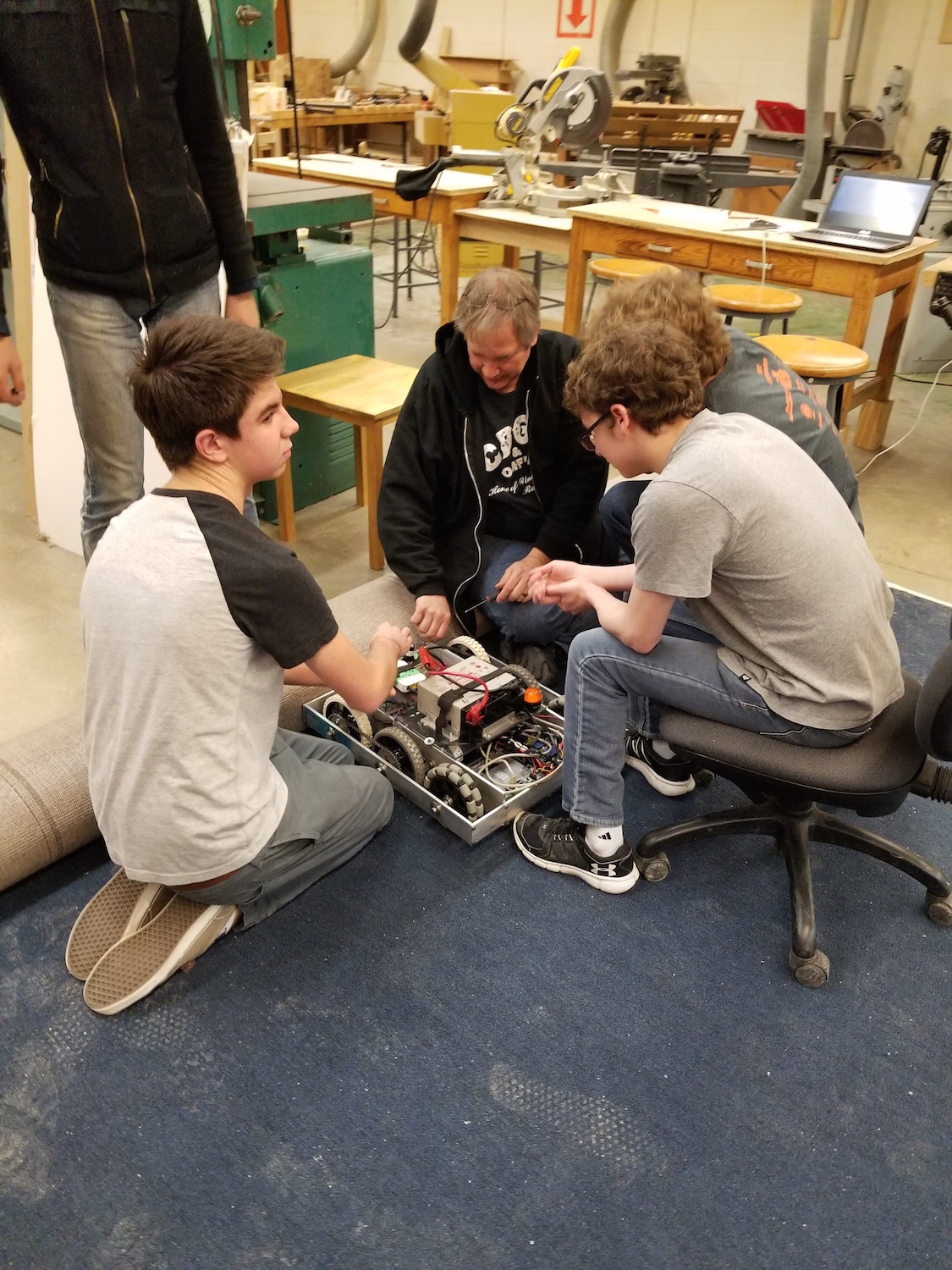
Week 4 – Fabrication and Assembly
The elevator was finished and by the end of the week was incorporated into the rolling chassis. The coding team began working with the chassis on control. The claw mech continued fabrication.

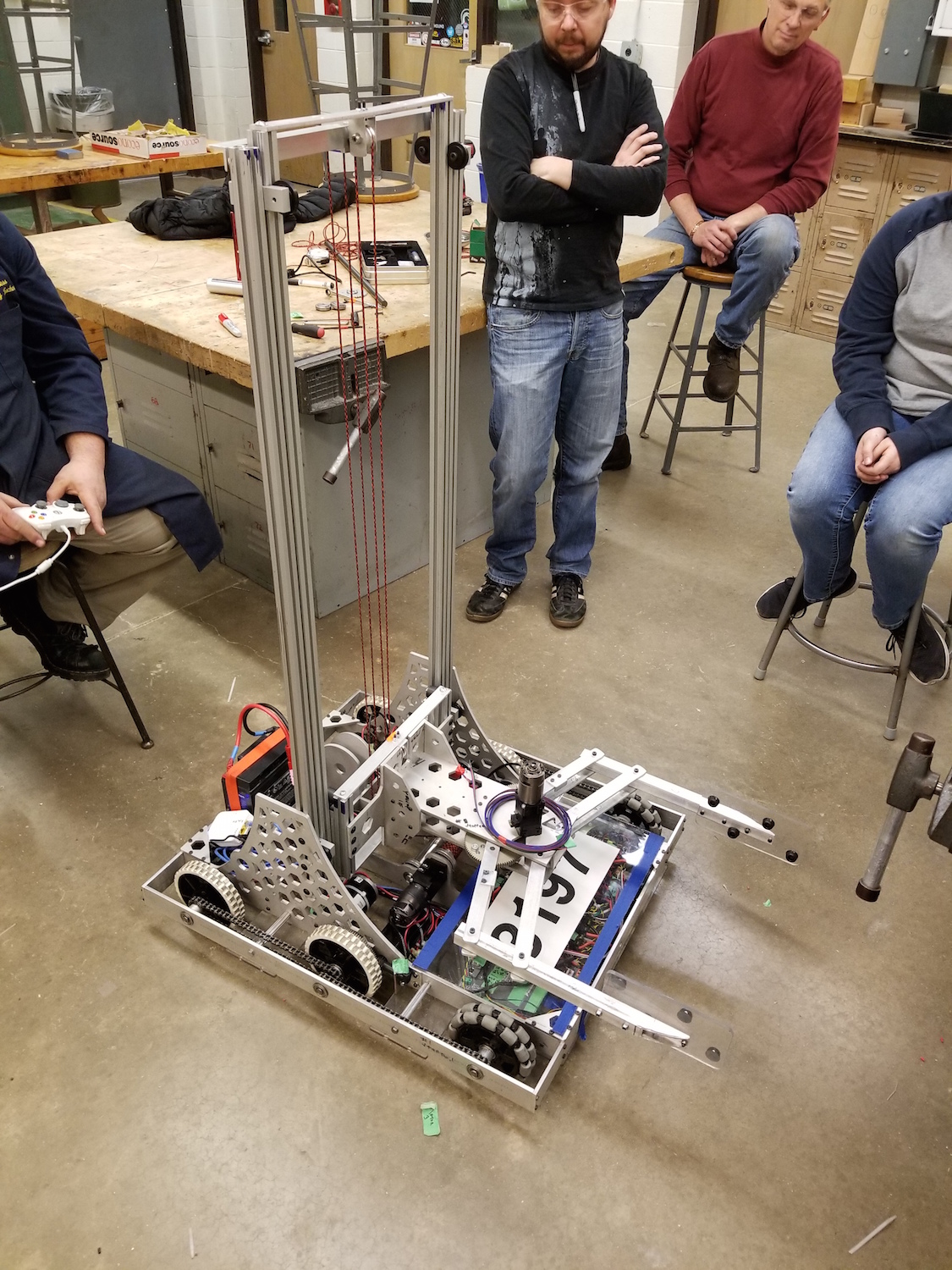
Lift mech., automated.
Posted by Cedarburg High School Robotics – Team 3197 – Hexhounds on Friday, February 9, 2018
Week 5 – Control Assembly and Testing
The claw mech was incorporated into the robot chassis and the elevator this week, allowing the robot to pick up cubes and lift them. The control team continued working with code to enhance the robot’s abilities.

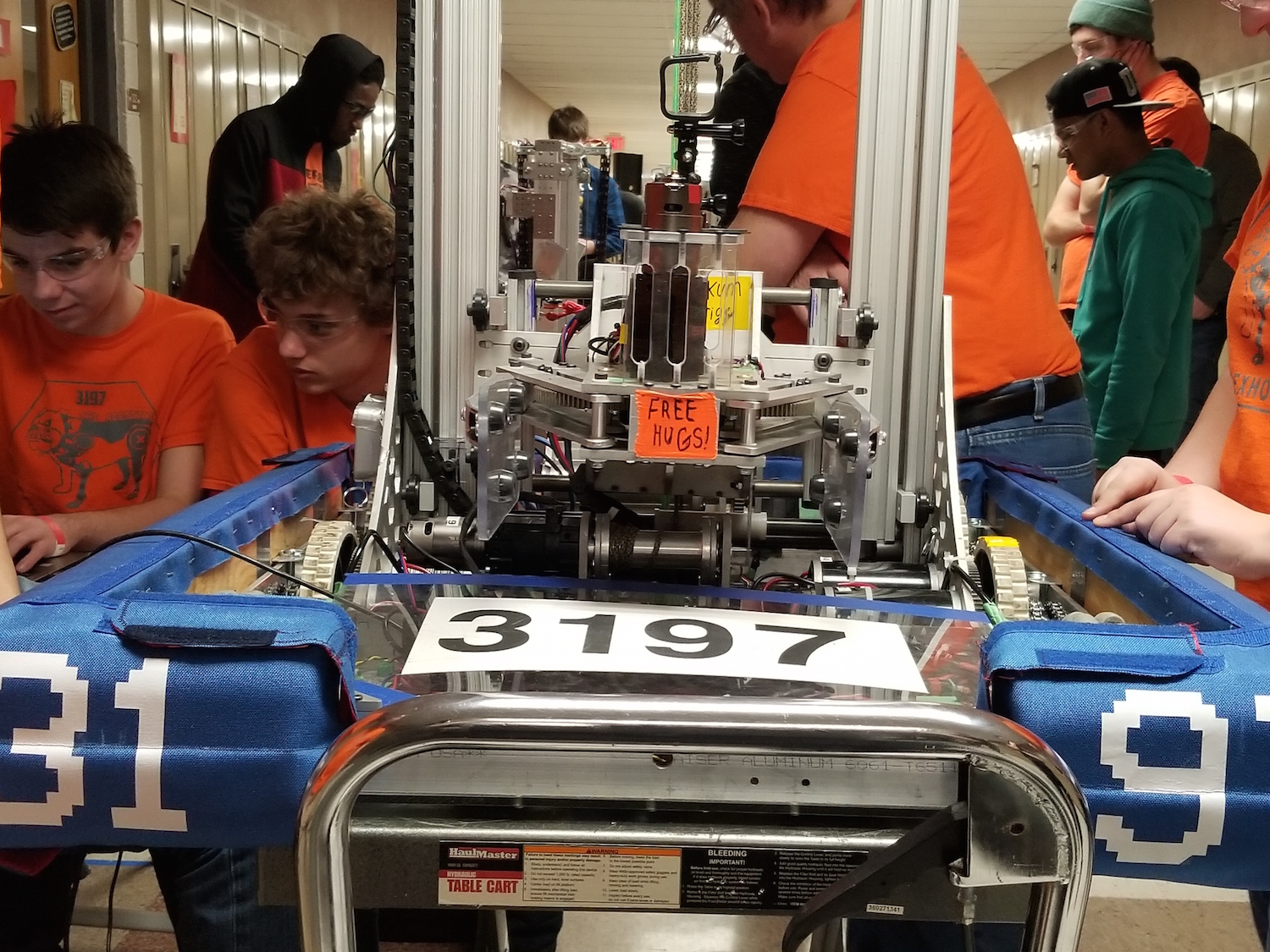
Week 6 – Last week! Testing and Tuning
This week we fine tuned the robot’s mechanisms and took part in practice matches held at a Mini-Regional in Sussex, WI. The control team continued testing the robot’s abilities as we ran in the practice matches and made the necessary fixes to the robot.

Bag Day! – 2/20/18 at 11:59 pm
The final day to work on our robot. After this we put our robot in a bag until our St. Louis and Milwaukee Regional Competitions.